

流程是一个顶级设计元素,可使您创建机器人![]() 代替现场人工坐席处理客户交互的软件应用程序。与联系人
代替现场人工坐席处理客户交互的软件应用程序。与联系人![]() 与联络中心的坐席、IVR 或机器人交互的人员。之间对话的视觉表示。 流程是使用您的意图的另一种方式。 与故事和规则一样,流程可使您设计与意图相关的对话,并示教您的机器人如何响应这些意图。
与联络中心的坐席、IVR 或机器人交互的人员。之间对话的视觉表示。 流程是使用您的意图的另一种方式。 与故事和规则一样,流程可使您设计与意图相关的对话,并示教您的机器人如何响应这些意图。
在机器人的配置中,流取代了故事![]() 用于训练机器人以根据意向和上下文进行交互处理。和规则
用于训练机器人以根据意向和上下文进行交互处理。和规则![]() 用于定义对不随上下文变化的消息的机器人响应。,因此您无需创建这三者。 您唯一需要创建故事或规则的情况是,如果您需要使用流程尚不支持的机器人作。 除了流之外,您仍然需要配置回退。
用于定义对不随上下文变化的消息的机器人响应。,因此您无需创建这三者。 您唯一需要创建故事或规则的情况是,如果您需要使用流程尚不支持的机器人作。 除了流之外,您仍然需要配置回退。
| 概念 | 定义 | 示例 | 机器人做什么 |
|---|---|---|---|

话语 |
联系人 |
“我丢失了密码。” “我的余额是多少?” “你是机器人吗?” |
机器人使用自然语言理解 (NLU) 来分析每个联系人话语,以确定其含义或意图。 |

意图 |
联系人想要传达或完成的内容。 联系人发送的每条消息都有一个意图。 |
“我丢失了密码”具有“重置密码”的意图。 “你好”有“打招呼”的意思。 |
机器人使用 NLU |

实体 |
联系人消息中定义的一条信息。 | 个人或产品名称、电话号码、帐号、位置等。 | 机器人使用 NLU 来识别联系人消息中的实体。 实体帮助机器人理解联系人消息的含义。 |

插槽 |
从联系人的消息中提取并保存以用于机器人响应的实体。 类似于变量。 | 为联系人姓名创建一个时间段可以让机器人在交互期间在响应中使用该姓名,使其更加个性化。 | 当被配置成执行此操作时,机器人会从联系人消息中提取实体并将其保存在插槽中。 可以让机器人稍后在对话中使用此信息。 |

规则 |
定义机器人对不会随上下文改变含义的消息的响应。 |
|
规则是配置机器人如何响应意向的两种方法之一。 规则对于某些类型的意图有用,但不适用于所有意图。 |

故事 |
训练机器人处理基于消息意图和会话上下文的交互。 | 在关于忘记密码的交互中,机器人会回应“我该怎么做? “我该怎么做?”。 如果交互是关于创建新帐户,则响应会大不相同,即使在这两种情况下,联系人都使用相同的词语和相同的意图 - 获取更多信息。 | 情景是配置机器人如何响应意向的两种方法中的第二种。 故事教机器人如何利用对话的上下文来做出适当的响应。 |

机器人操作 |
机器人在处理交互时所说或所做的任何事情。 |
在有关忘记密码的交互中,机器人通过发送网站上的密码重置常见问题解答链接来进行响应。 当联系人表达沮丧时,例如“我不明白! 没用啊!!!”时, 机器人回复“对不起。 您想让我把您转给人工坐席吗?” 当联系人同意后,机器人启动此转移。 |
机器人作是定义您希望机器人如何响应每个意向时使用的选项。 它们可使您灵活地配置每个响应,以实现满足联系人需求的结果。 |
流程设计器
流程设计器是一个点网格画布工作区,您可以在其中添加联系人和机器人消息,类似于创建故事![]() 用于训练机器人以根据意向和上下文进行交互处理。或规则
用于训练机器人以根据意向和上下文进行交互处理。或规则![]() 用于定义对不随上下文变化的消息的机器人响应。。 当您将消息添加到流程时,它们会自动用线连接以显示消息之间的对话流程。
用于定义对不随上下文变化的消息的机器人响应。。 当您将消息添加到流程时,它们会自动用线连接以显示消息之间的对话流程。
每次机器人应答后,您都可通过添加一条或多条联系人消息在对话中创建分支。 每个联系人消息分支均代表联系人在对话中此时可能引入的意图。 这可使您设计一个包含联系人发出的不同类型请求或应答的流程。
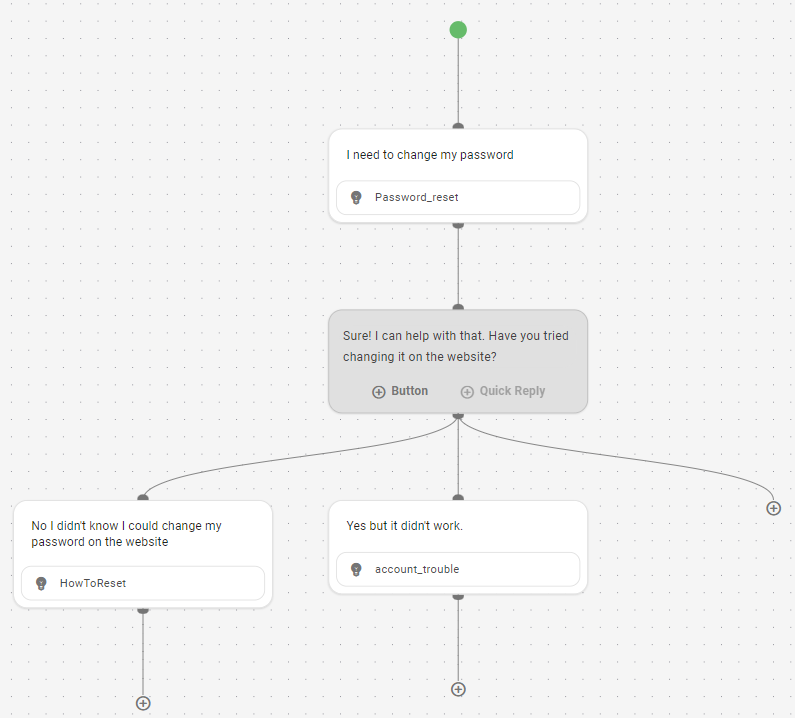
例如,如果流程以联系人询问更改密码开始,则机器人可询问该联系人是否尝试在网站上更改密码。 您可以添加根据联系人对机器人问题的应答来使对话进行分支的联系人消息。
对于流程中的每个分支,您都可通过添加机器人的应答和来自联系人的后续消息来构建对话。 仅当您添加的消息属于该流程的上下文时,您才应添加到该流中的对话。 请参阅本页的以下部分,了解有关机器人上下文的更多信息。
流设计器包括 Bot Builder Copilot,可让您基于自然语言快速生成新流。 使用“创建处理地址更改请求的流”等语言。 Bot Builder Copilot 使用消息 (目的) 和脚本构建流。 您只需微调生成的流以供使用。 此时,Bot Builder Copilot仅限于创建新流。
使用流程示教您的机器人
流程会向您的机器人示教对话上下文或意图如何相互关联。 当流程以意图开始时,机器人会了解到后续意图只能在初始意图之后发生。
例如,流程以联系人消息 Hi (intent: greetings) 开头,然后是机器人响应,然后是另一条联系人消息。 第二条联系人消息将另一个意图引入流程。 这会让机器人知道第二个意图与第一个意图相关并依赖于第一个意图。 如果第二条联系人消息是我需要更改我的密码,则机器人就会了解到联系人只能在问候意图之后立即询问更改密码。
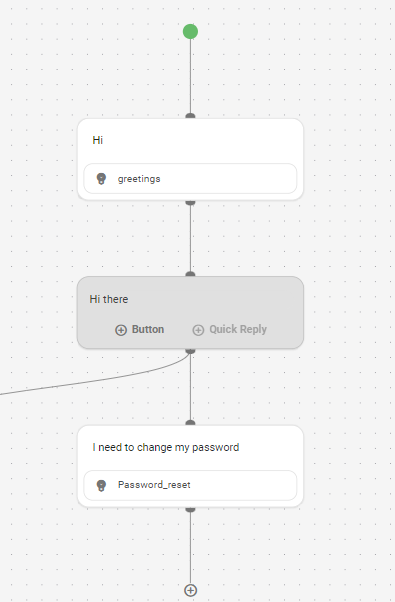
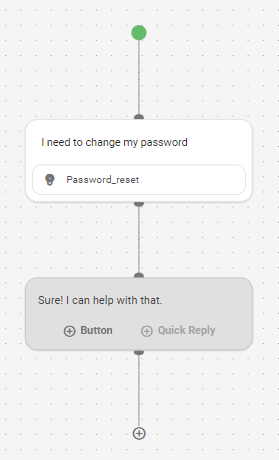
如果您希望联系人能够在对话中的任何时刻询问是否更改密码,更好的方法是创建单独的密码更改流程。 如下图所示。
机器人可以跳转从一个对话上下文跳转到另一个对话上下文,具体取决于您构建的流。 在每个流程中,仅包含依赖流程上下文的意图。 如果一个意图不依赖于另一个意图的上下文,则它应该是一个单独的流程。
依赖上下文的意图
某些意图可能依赖机器人的上下文来学习如何做出适当的响应。 例如,对于联系人响应,例如“我该怎么做”,机器人会根据对话的上下文来了解如何响应。 下图显示了两个不同上下文中的相同意图(意图:HowDoIDoThat)。 机器人使用对话的上下文来确定如何响应。
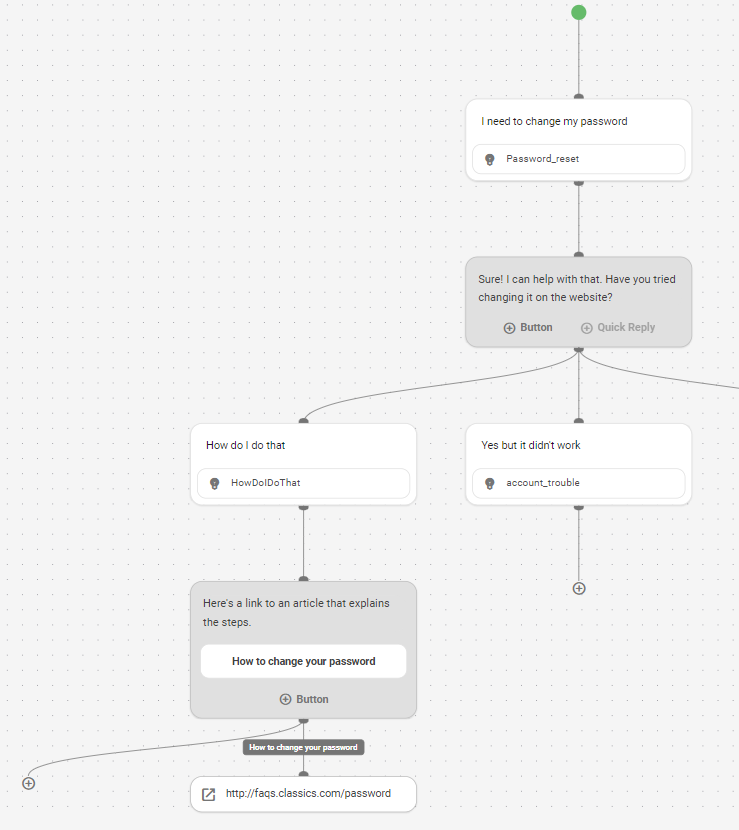
在与任务对话相同的流中包含 HowDoIDoThat 意向可帮助机器人了解如何在该特定意向的上下文中响应 HowDoIDoThat。 你可能有多个意向,这些意向在其流中包含 HowDoIDoThat 意向。 机器人对每个意图的响应可能不同。
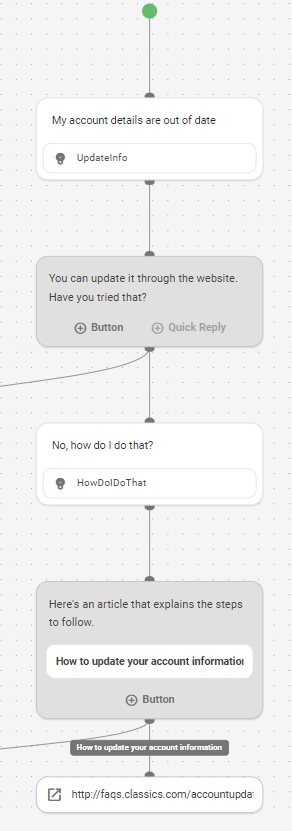
机器人会学习根据对话的上下文使用不同的响应。
流之间的连接
联系人![]() 与联络中心的坐席、IVR 或机器人交互的人员。可以在对话期间的任何时间点触发流。 如果联系人在对话过程中提出与当前意图
与联络中心的坐席、IVR 或机器人交互的人员。可以在对话期间的任何时间点触发流。 如果联系人在对话过程中提出与当前意图![]() 联系人所说/所输入内容背后的含义或目的;联系人想要传达或达成的事情。无关的请求,则机器人将切换到新意图的流程。 机器人可以处理上下文切换并返回到未完成的意图,但您必须确保已设置流来训练它们处理它。
联系人所说/所输入内容背后的含义或目的;联系人想要传达或达成的事情。无关的请求,则机器人将切换到新意图的流程。 机器人可以处理上下文切换并返回到未完成的意图,但您必须确保已设置流来训练它们处理它。
您可以设计流,以便它们根据对话的上下文在适当的情况下触发其他流。 按钮和快速回复允许您指定跳转到不同的流程。 例如,在处理对话的初始问候语阶段的流程中,机器人会通过一系列快速回复来提示联系人,以帮助缩小意图范围。 每个快速回复都配置为触发该意图的流程。 当联系人选择快速回复时,机器人会跳转到该流程。
按钮和快速回复也可以触发意图。 当您触发意图时,对话会在同一流程中继续。 仅当意图取决于上下文对话时,触发意图才合适。 如果意图独立于对话的上下文,则应在单独的流中构建它并改为触发流。
流中的分支
向机器人响应添加按钮或快速回复会在流程中创建分支。 当按钮或快速回复触发意图![]() 联系人所说/所输入内容背后的含义或目的;联系人想要传达或达成的事情。时,该分支的流程必须通过其他机器人响应和/或意图来完成。 某些分支可能包含其他子分支。 触发其他流或打开 URL 的分支以该作结尾,无法添加到其中。
联系人所说/所输入内容背后的含义或目的;联系人想要传达或达成的事情。时,该分支的流程必须通过其他机器人响应和/或意图来完成。 某些分支可能包含其他子分支。 触发其他流或打开 URL 的分支以该作结尾,无法添加到其中。
完成分支时,请小心引入其他意图。 请记住将每个分支的流保持在流整体意图的上下文内。
确保流程中的每个分支都已完成。 不完整的分支会导致机器人不知道如何响应意图。 它将遵循回退。